Origami Robot Transforms Foldable Exo-Suit
/
Scientists just built origami transformer robots! These are tiny bots with foldable exo-suits they change to perform different tasks.
It wraps itself in high-tech origami sheets that fold into wings, wheels, and other forms to walk, roll, and sail interchangeably.
“It’s almost like putting clothes on the robot to give it different kinds of powers,” says study co-author Daniela Rus, a roboticist at MIT. Such quickly customizable machines could help in almost every industry because of the very ability to change according to the need.
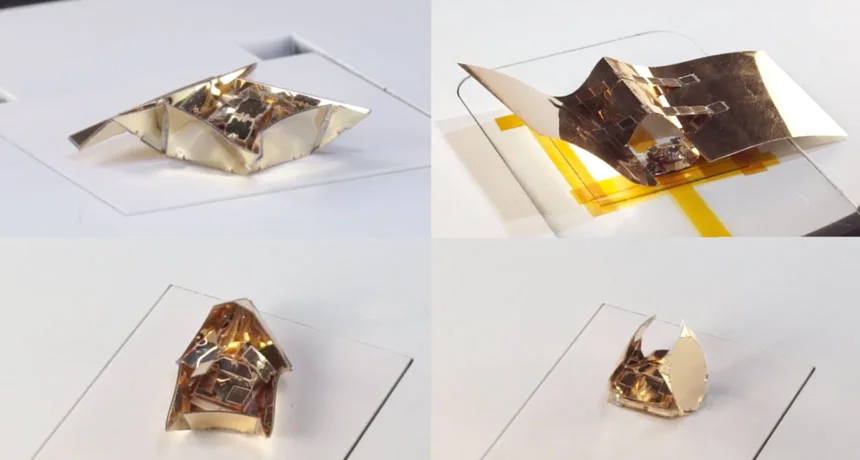
The core of their transformation is a magnetic cube a few millimeters across, which Rus’ team “drove,” using magnetic solenoid coils as remote controls. To enclose this magnetic engine inside an origami body, a cube sits atop an unfolded origami sheet: a layer of the heat-shrinking material between two polyester planes. Along the fold lines, the shrinking film is exposed to facilitate folding.
Heating the origami sheet to 65° Celsius, the heat-shrinking material along the creases contract, folding into a 3-D "Walk-bot" body that can walk. Rus’ team used the same method with other origami exoskeletons creating a bigger Walk-bot, Wheel-bot, Boat-bot, and Glider-bot.
The outer exoskeletons were fastened into place with four latches made of water-soluble material allowing the bots to remove their origami outerwear and move into a new one. This is pretty exciting because the limit is your imagination with these transformers. Shape-shifting robots could also be useful in other situations where they must perform a wide range of tasks without packing lots of spare parts, like during natural disaster emergency response operations or space missions.
A roboticist at Imperial College London said such adaptable robots could enable surgery without cutting where a patient ingests a magnetic core and various exoskeletons that a surgeon could manipulate remotely.
Sources:
https://www.sciencenews.org/article/origami-metal-robots-magnet
S. Miyashita et al. Robotic metamorphosis by origami exoskeletons. Science Robotics. Published online September 27, 2017. doi: 10.1126/scirobotics.aao4369.





